
レクサスマルチステージハイブリッドというのが出ましたが、
どういうものかちゃんと説明されてなくて
http://monoist.atmarkit.co.jp/mn/articles/1703/17/news037.html
例えばこことか、広報資料を棒読みしたような説明で、書いた人が
いまいちわかってない感がありますよね?そんな説明ばかりなので
別方法の切り口で説明してみます。
前回はTHSでデフ比がハイギヤだと、エンジンの最高回転数より先に
発電モータの最高回転数に当たるのでエンジンがフルパワーを出せないという
説明をしました。では、ローギヤにすればいいだけの話なのに、なぜそうしないか?
という説明を今回いたします。
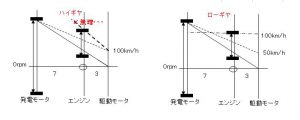
これは前回説明した図ですが、左の図はデフ比ハイギヤの模式図で、
100km/hで発電モータの最高回転数にあたってエンジンが最大パワーを
出せていない様子です。(本当は太い点線がよいのですが、明らかに
最高回転数を超えるので無理です)
右の図は、それに対して、デフ比を2倍ローギヤにしたので、100km/h
では楽々最高回転数=最大パワーを出せることがわかります。
なぜ、そうしないかですが、
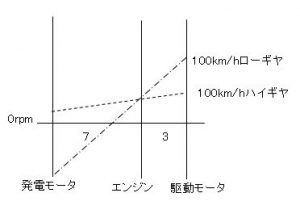
今度は平地を100km/h一定速で走ることを考えます。
すると、先ほどの100km/hハイギヤとローギヤの回転数関係は
上の図のようになります。この一点鎖線は発電モータ回転数が
マイナスになっており、イコール伝達効率が悪いということになるのです。
ですので、加速はちょっと不利だけど発電モータ回転数がマイナスになりにくい
ハイギヤを選択するのが当然の選択となるのです。
発電モータ回転数=マイナスがなぜ悪いのかは、ちょっと計算しないと
わからないかもしれません。例を挙げて計算してみます。
100km/h平地一定速のエンジンパワー(=走行に必要なパワー)は
10kWとします。
※ちなみに、エンジンパワー>走行に必要なパワーであれば
パワーが余るので、充電しますし、逆であればパワーが足りないので
電池から補充=放電します。充電も放電も当然有限で、いつかは終わる
ので、エンジンパワー=走行、で考えるのが順当です。
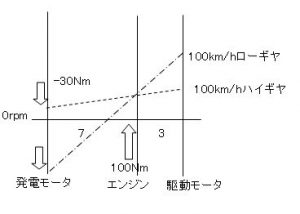
簡単に、エンジントルク100Nm、エンジン回転数1000rpmとします。
100km/hの駆動モータのある所の回転数はハイギヤは1500rpm、ローギヤは
その倍の3000rpmとします。
すると、発電モータ回転数は三角形の相似の関係から、
ハイギヤは-166rpm、ローギヤは-3666rpmとなります。
発電モータトルクは、エンジントルク100Nmを7:3に分けたものを受けるので、
-30Nmとなります。エンジンパワー=走行に必要なパワーとなるために、
駆動モータパワーは発電モータパワーが発電した分をそっくりそのまま消費します。
ハイギヤから発電モータ、駆動モータのパワーを計算しますと、
発電モータ:-30×-166×π/30000=+0.5kW、駆動モータ-0.5kW
ローギヤは
発電モータ:-30×-3666×π/30000=+11.5kW、駆動モータ-11.5kW
となります。
要するに、プラネタリギヤでCVT機構を実現するために、発電モータで
エンジンのメカニカルトルクを受けて電気に変換し、
駆動モータで再度メカニカルトルクを出すという電気変換の動作が必要になりますが、
ハイギヤはその電気変換分は|0.5|+|-0.5|=1kW、
ローギヤは電気変換分は、なんと、|11.5|+|-11.5|=23kWとなります。
電気変換の10%が電気損失になるとすると、ハイギヤは100W、ローギヤは2.3kWの
損失となります。ハイギヤは効率99%、ローギヤは効率77%、勝負になりませんね。
なにより、10kWのパワー伝達に23kWの電力の伝達が必要というのは
おかしくないですか?と聞きたくなります。
シリーズハイブリッドでも、10kW充電して、10kW出力するので電気変換量は20kWです。
シリーズハイブリッド以下の悪効率、当然極力避けたいので燃費のためには
できるだけハイギヤがよいことになります。(それでも発電モータ回転数は
条件によってはマイナスになるので、THSははっきり言って高速は苦手です)
ちょっと長くなったので次回まとめます。