
アウトランダーPHEV用ハイブリッドモニターの説明書に、
モータ損失は電流が増えるほど大きくなると書いているのですが、
モータ効率はこうじゃないの?と質問されましたので、説明してみます。
http://itohserver01.nagaokaut.ac.jp/itohlab/paper/2014/140606_spcsendai/sato.pdf#search=%27%E5%90%8C%E6%9C%9F%E3%83%A2%E3%83%BC%E3%82%BF%E3%83%BC+%E5%8A%B9%E7%8E%87%E3%83%9E%E3%83%83%E3%83%97%27
これの5ページ目です。
モータ損失の2大要素は銅損と鉄損です。(他に渦電流損とかありますが)
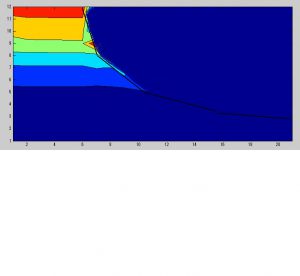
銅損はモータに流す電流の2乗×巻き線の抵抗です。
巻き線(銅線)にも抵抗があって、例え0.01Ωとしても、100A流すと
100×100×0.01=100[W]とばかになりません。図にするとこんな感じです。
横軸:モータ回転数、縦軸:モータトルクです。数字は仮定の数値です。
青:損失小→赤:損失大になっています。
鉄損は回転数に比例するもののようです。こんな感じです。
同じく、青:損失小→赤:損失大です。
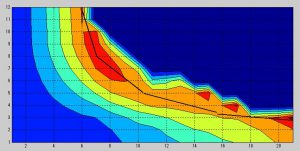
図中の線は最大トルクカーブです。ですので、本来その外側は模様はないのですが、
都合上模様が出てしまっています。
これを足し算しますが、例えば、銅損だけで言うと、縦方向には増えていますが、
横方向には増えていません。「効率」は1-(損失/モータパワー)
で計算されますので、モータパワー=トルク×回転数ですので、
横方向に行くと、後ろの項の分母が増えて分子変わらずなので、効率は上がります。
鉄損を足すとどうなるかと言うと、鉄損は回転数に比例ですので、
損失項は分母と分子は同じ割合で増えるので、結局足しても効率アップは
変わらず、です。
ですので、
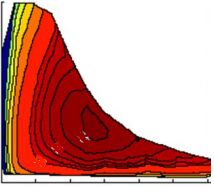
こんな形になるのかなと思っています。
上の説明だと、右の方がいいことになって、真ん中がいいということに
ならない?その辺は続きを書けたら、と思います。