
加減速する走行方法としない走行方法の比較ですが、
例えば40-60-40-60km/hというような走り方と
50km/h一定の走り方ですと、前者の加速時のエンジンパワーは
後者より大きいです。(加速分パワーが大きい)
結果、燃費最適動作ポイントに近づくのであれば
前者の方が熱効率はよさそうです。
EV走行部分に関しては、前者がゼロAで走行、
後者がある程度の電流で力行しているとすると、
後者の損失(例えば電流^2×内部抵抗など)の方が
大きくなりそうです。
ということで前者の方がよさそうなのですが、
速度が違うので走行抵抗が違ってくることを考える必要があります。
前者も後者も何となく平均速度は変わらないような感じもしますが、
たとえそうだとしても、
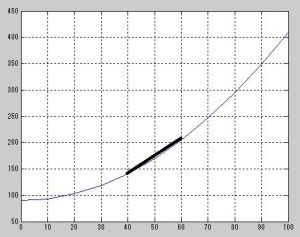
こんな感じで、40km/hの走行抵抗と60km/hの走行抵抗を
足して2で割ったものは、50km/hの走行抵抗より大きいので
損していることになります。
書いてみると、あまり差がありませんが、加減速走行を
する時にはあまり速度差を大きくすると走行抵抗が損だという
ことです。理由は、走行抵抗曲線の形状が、下に凸な曲線
だからということです。