
昨日の続きです。
電磁石を配置したステータの近くをロータが回ることに
より、ロータの磁石が発する磁束が電磁石を通ったり
横切ったりします。そうすると電磁石に起電力が
働きます。これを逆起電力といいます。
なぜ逆かというと、モータを回そうとして電磁石に
電流を流そうとするときの電圧に打ち勝とうとする
向きに電圧がかかるからです。ですので、電圧300Vに
対して、逆起電圧280V、残りの20Vで電流を流す、
というような感じになります。すると、モータの回転数-トルク
特性はこんな感じになります。といいますか、「モータ特性」とかで
検索すると出てきますね。
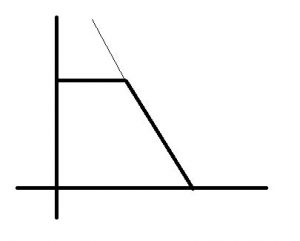
横軸回転数、縦軸トルクで本当は斜めの線なのですが、
大抵0~2、3000rpmまで最大トルクが設定されていますので
こんな感じになります。
それで、この斜めの線より右は逆起電圧に打ち勝てないので
トルクを出せないことになります。(電圧を増やせばいいのですが)
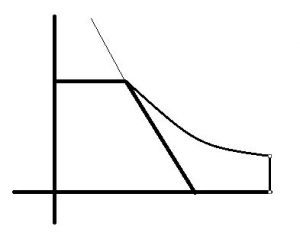
しかし、電流の位相を遅らせるとロータの磁束を打ち消す方向に
磁束を発生させることができて斜めの線より右でもトルクを出せるように
なります。結果、トルクカーブはこんな感じになります。
それで、その時は昨日出した位相-トルクカーブで
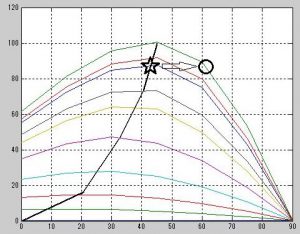
☆でトルクを出していたのを○にするということになり、
電流を増やすことになります。
ですので、昨日の説明では右に行くと効率がよくなる要素だけだった
のですが、斜めの線より右の領域では、そうとは限らないことに
なります。結果、昨日の図のような効率になるということになります。