
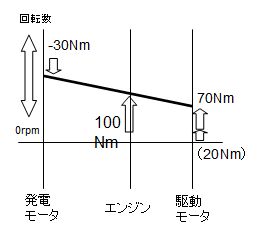
THSのトルク関係は基本はこれ(エンジン正トルク)と
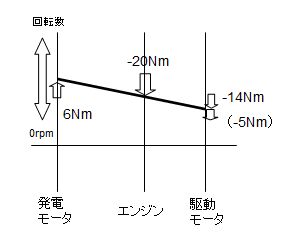
これ(エンジン負トルク=エンブレ)です。
出力軸トルク(駆動モータの軸)はエンジントルクの一部(70%)と駆動モータトルクの和です。
発電モータトルクはエンジントルクの一部(30%)を受けるので、向きは逆です。
図に表すと上の図のような感じになります。
駆動モータのところの2つの矢印は、エンジントルクの一部と駆動モータトルクを表します。
駆動モータトルクはカッコにしていますが、これは自由で、いくつでも構いません。
考え方は、発電モータパワー(発電モータトルク×回転数)=駆動モータパワー(駆動モータトルク×回転数)
にするのが基本です。上記がイコールだと、バッテリーとの出し入れがないので、電流ゼロに
なります。そのだいたいの数値をカッコ内に書いています。それより駆動モータトルクを多く出すと
アシストということになります。駆動モータトルクを少なく出すと、逆にバッテリーに充電されます。
それで、SOC100%時のエンブレですが、次回書いてみます。